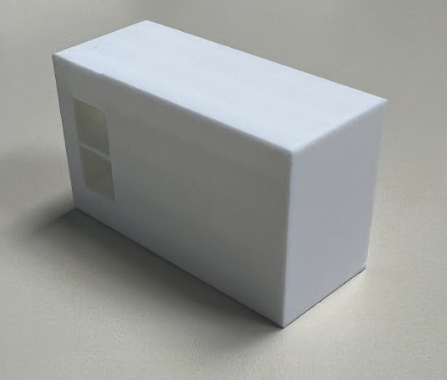
Cuboid Peg
35 mm × 25 mm × 60 mm
0.1 mm clearance
2 mm
5 mm
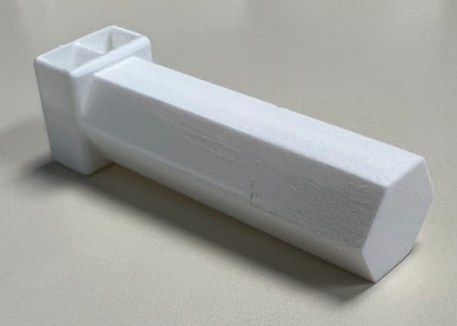
Hexagonal prism
60 mm × 19 mm (flat-to-flat)
0.1 mm
clearance
2 mm
5 mm
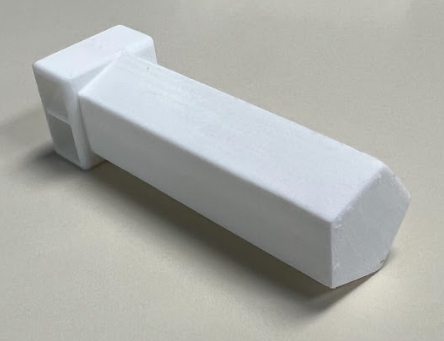
Pentagonal prism
60 mm × 19 mm (flat-to-flat)
0.1 mm clearance
2 mm
5 mm
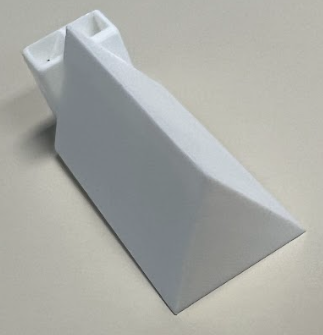
Triangular prism
60 mm long with a side length
of 34 mm
0.1 mm clearance
2 mm
5 mm

Cylinder
60 mm long with a diameter of
20 mm
0.1 mm clearance
2 mm
5 mm
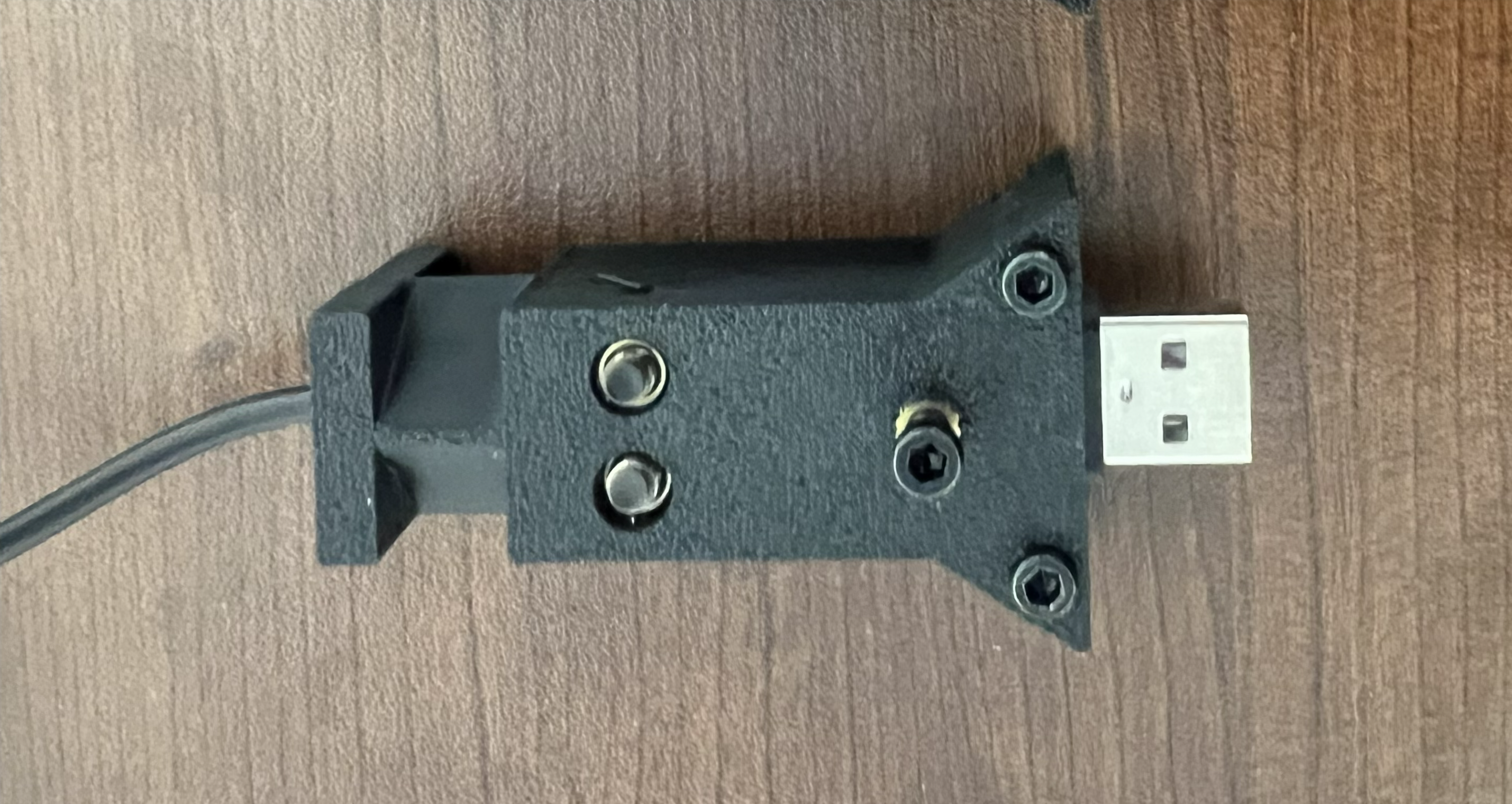
Standard USB-A
2 mm
5 mm
@ARTICLE{11520677,
author={Liu, Yibo and Oparnica, Stanko and Shewchun-Jakaitis, Simon and Fu, Guoyi and Wang, Jie and Yang, Jun and Jagannathan, Anand and Lo, Tony Hong-Yau},
journal={IEEE Robotics and Automation Letters},
title={SI-Diff: A Framework for Learning Search and High-Precision Insertion with a Force-Domain Diffusion Policy},
year={2026},
volume={},
number={},
pages={1-8},
keywords={Modeling;Learning (artificial intelligence);Force;Training;Field-flow fractionation;Shape;Trajectory;Conferences;Forging;6-DOF;Force and Tactile Sensing;Assembly;Force Control;Diffusion Policy},
doi={10.1109/LRA.2026.3693991}}
